Subprojects
The project has few subprojects. Some of them are developed in parallel and others are part of the end of the global project
Last update on February 10th, 2013.
Visual Attention Dataset: Nonlinear Road Topologies Perception in Unstructured Scenes
Please, if you use the data, refer them as:
Visual Attention Dataset: Nonlinear Road Topologies Perception in Unstructured Scenes. Provided by the 3D Gigascale Integrated Circuits for Nonlinear Computation, Filter and Fusion with Applications in Industrial Field Robotics Project. Marcelo L. Moreyra. http://lcr.uns.edu.ar/pictv/eyetrackerdata
Data description
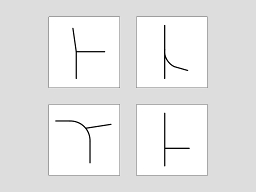
The dataset contains data recorded by an Eyelink 1000 eye tracker during an experiment in which 34 participants visually inspected 33 photos of 1024x768 resolution with a specific task. For each of the photographs the participant had to recognize the corresponding road topology. Each road picture appeared only for 3 seconds in order to pressure participant to focus only on what is relevant for the task assigned. After each image, a screen with 4 different topologies was shown to the participants to select which was considered the closest to the road just observed. The answer screen was held for as long as the participant needed to make a decision. The topology is defined here as a simplified representation of the shape of the road through a set of straight or curved segments connected together. An example is shown below:

The dataset file includes: 66 .jpg files with photographs and answer screens, .txt files with eyetracker recorded data, and the 'readme' files. All data and equipment configuration parameters used in the experiment are included in the latter. You can download the complete dataset from the next link:
Visual Attention Dataset.
The mentioned parameters and a detailed description of the experiment assumptions and procedures is also included in:
Marcelo L. Moreyra, Favio R. Masson, Eduardo. M. Nebot; Visual Attention Patterns for the Perception of Nonlinear Road Topologies in Unstructured Scenes. Submitted to Vision Research journal, April 2013
The Photographs
Different types of road topologies with different levels of complexity were captured in absence of cars in alternative or secondary roads, and unpaved streets in neighborhoods far from the center of the city of Bahia Blanca. The objective here was to reduce as much as possible the existence of distracting elements, so the places photographed were selected to have little or not structure at all. The pictures were taken from a similar height to the roof of a car because the camera will be located in that place in our test vehicle, which will be used to test future autonomous perception algorithms. The camera was tilted slightly down and set up with an opening angle wide enough to allow the observer to appreciate clearly the road topology shown in the image.
After initial calibration, the participant could practice with 3 of the photographs in order to familiarize with the equipment and the task assigned. The set of remaining 30 photographs and their corresponding answer screens were displayed one by one during the test. You can click on each image to see it in full resolution.
Training Images



Test Images






























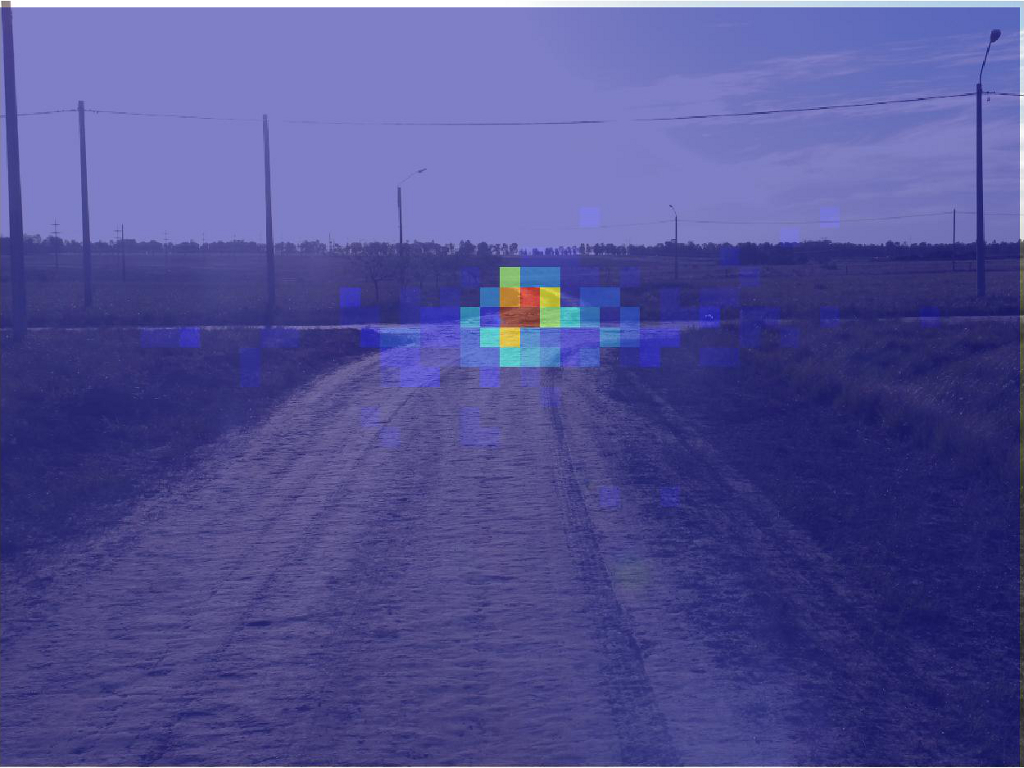
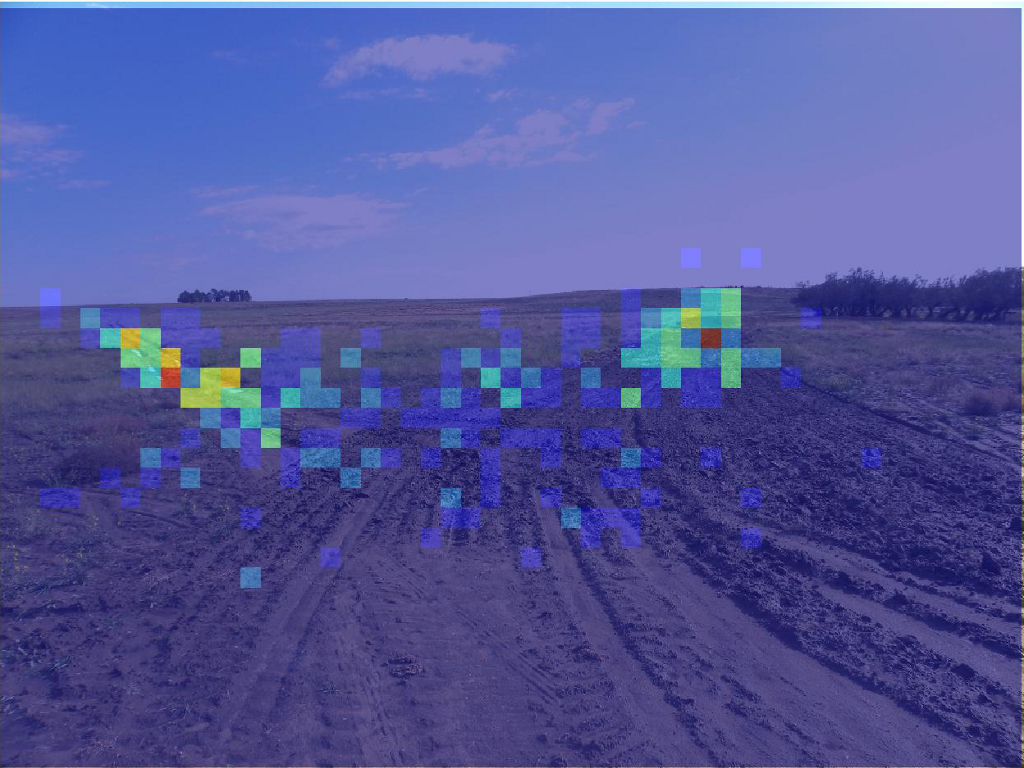
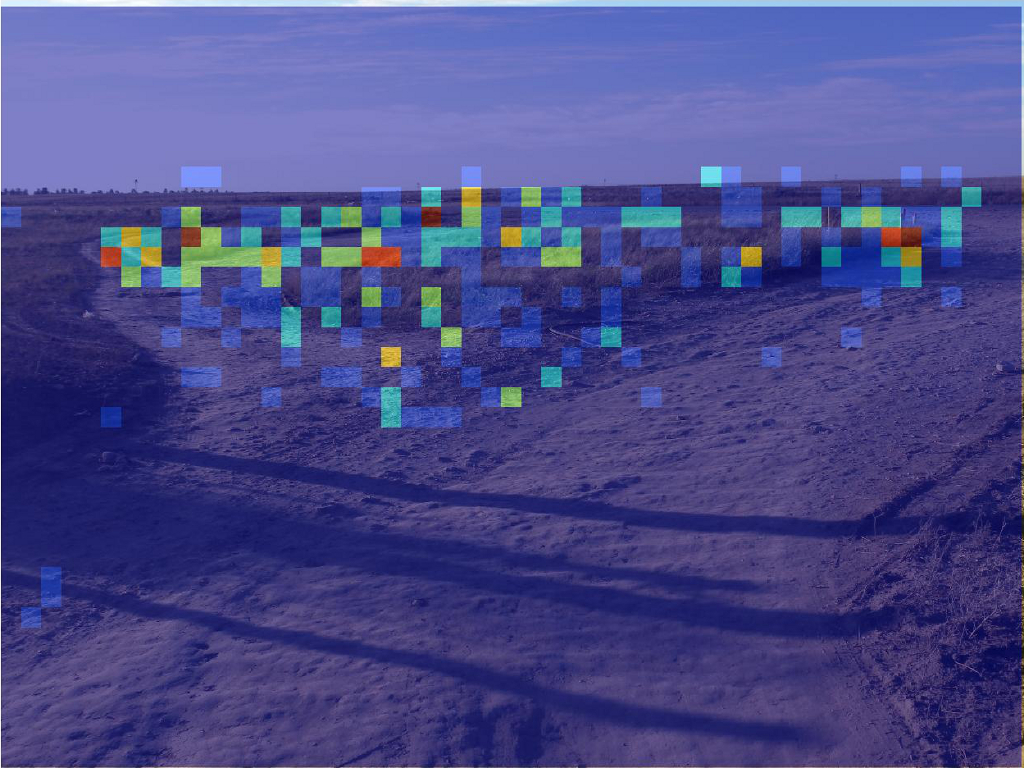
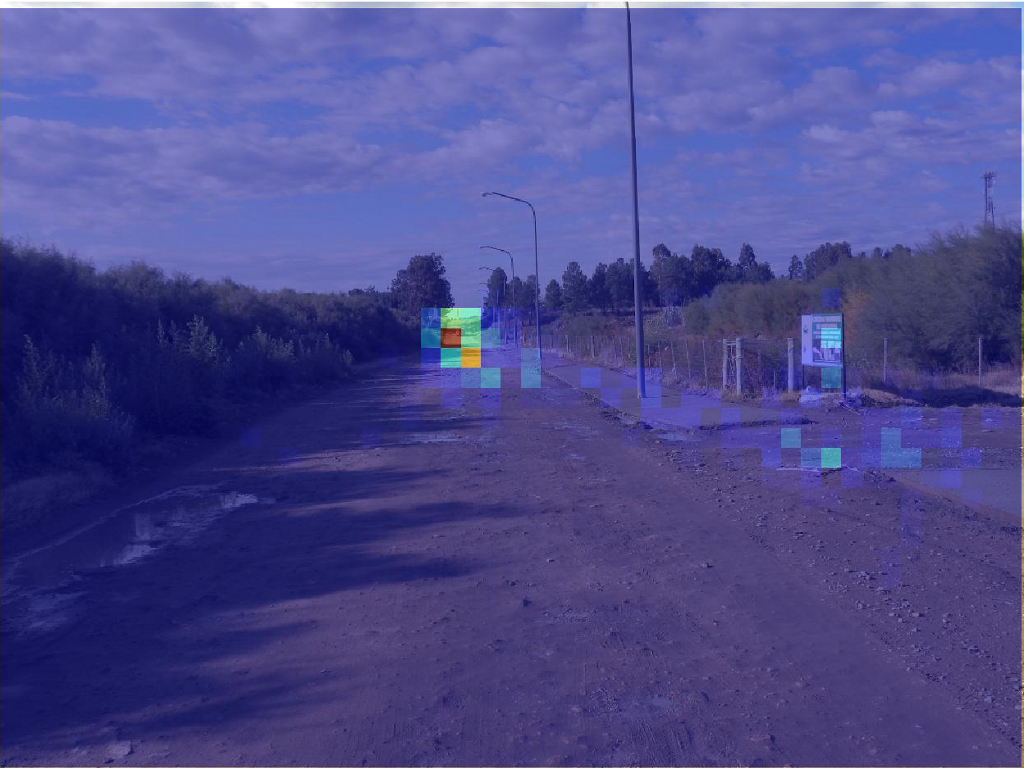
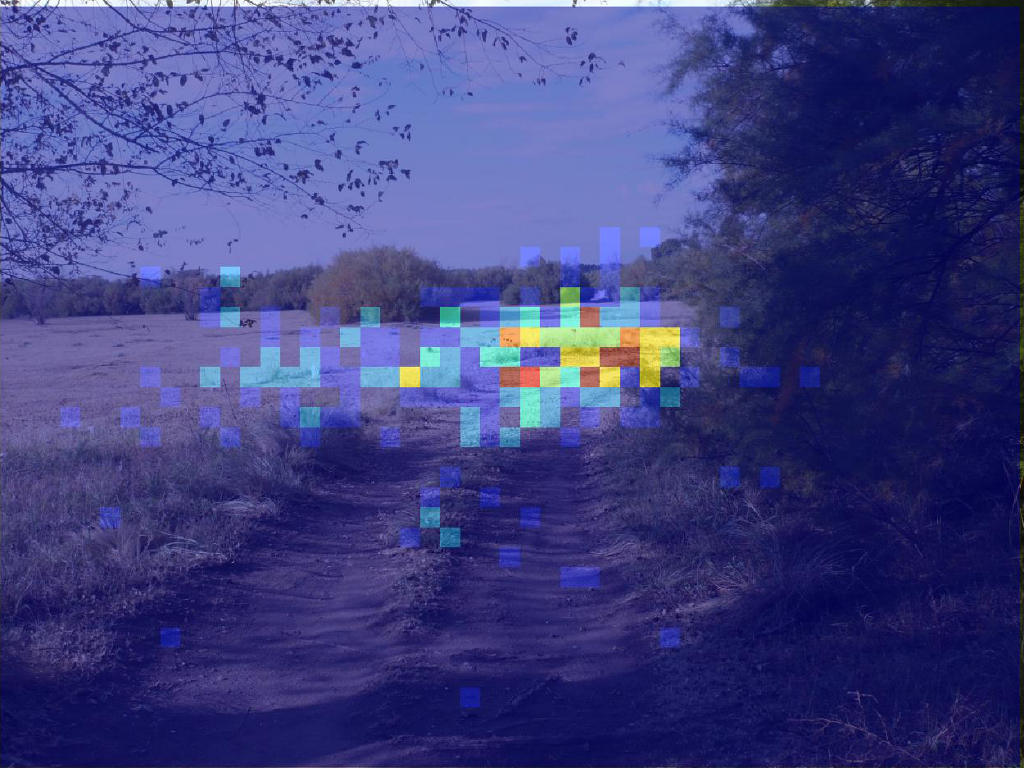
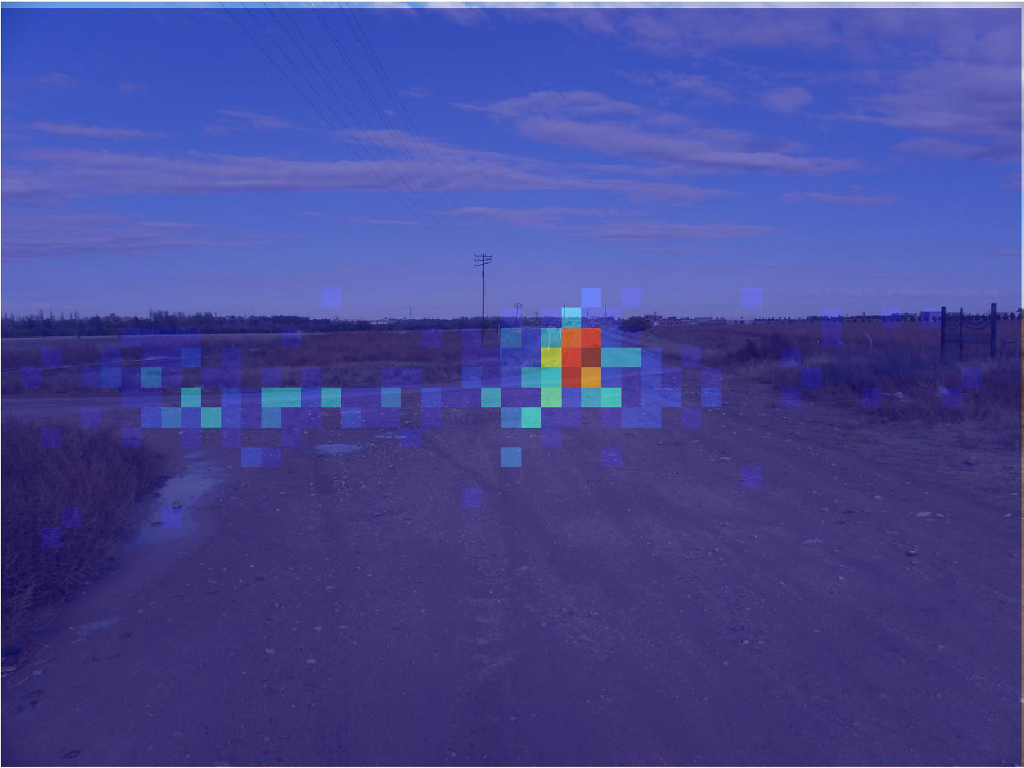
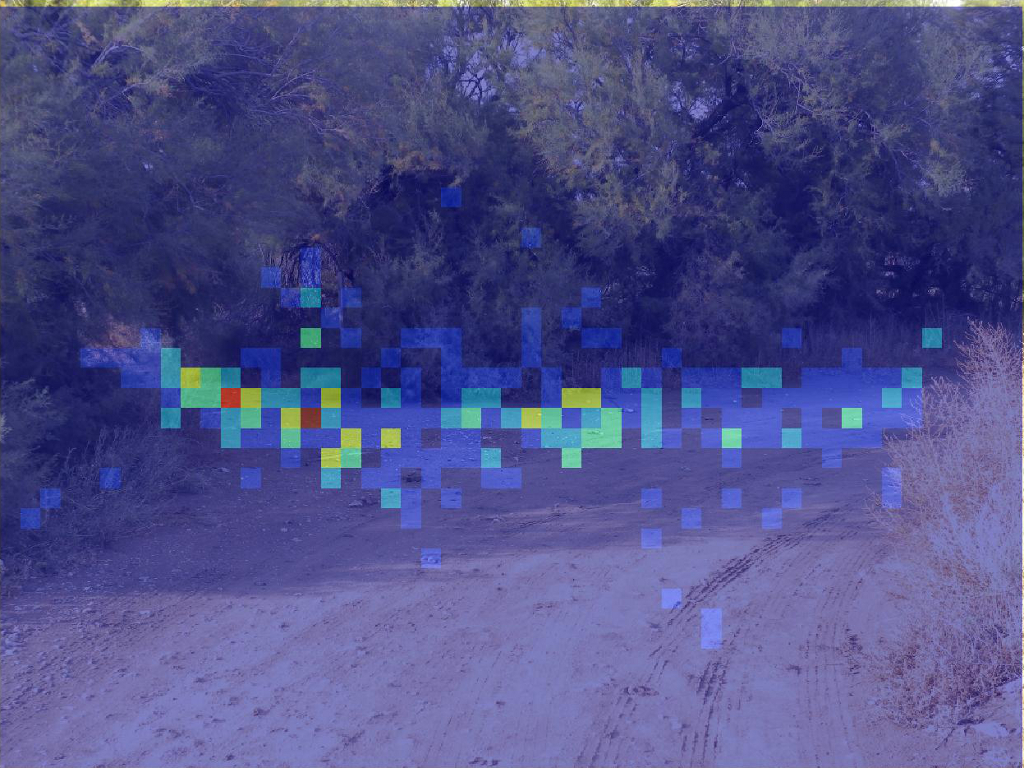
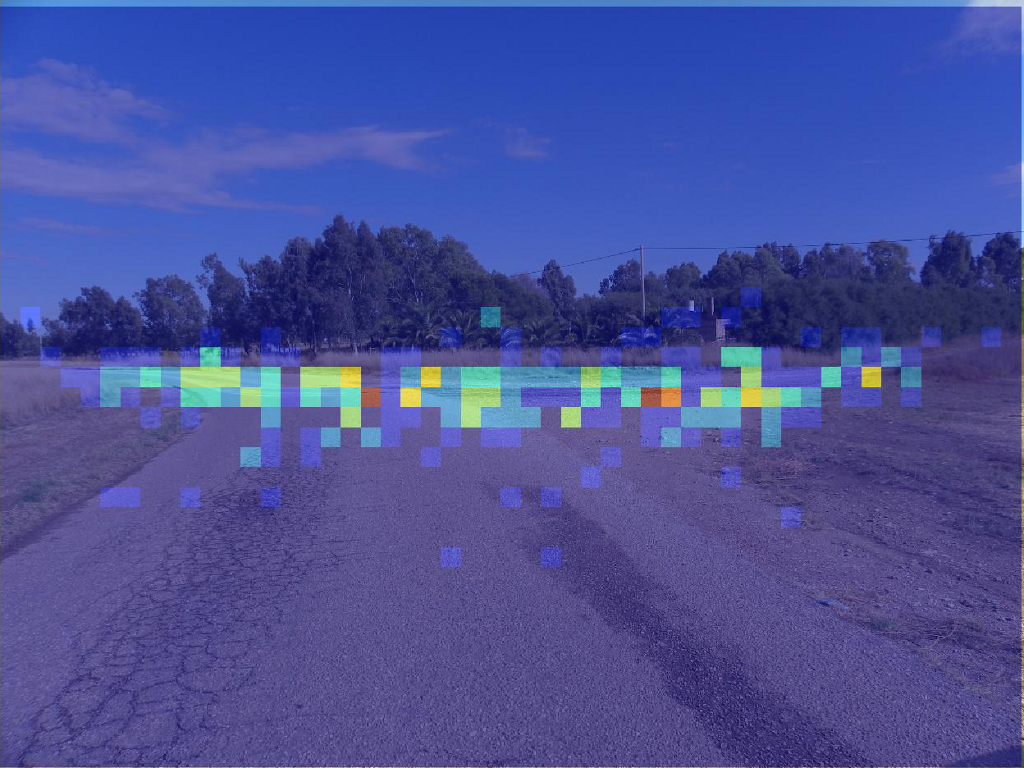
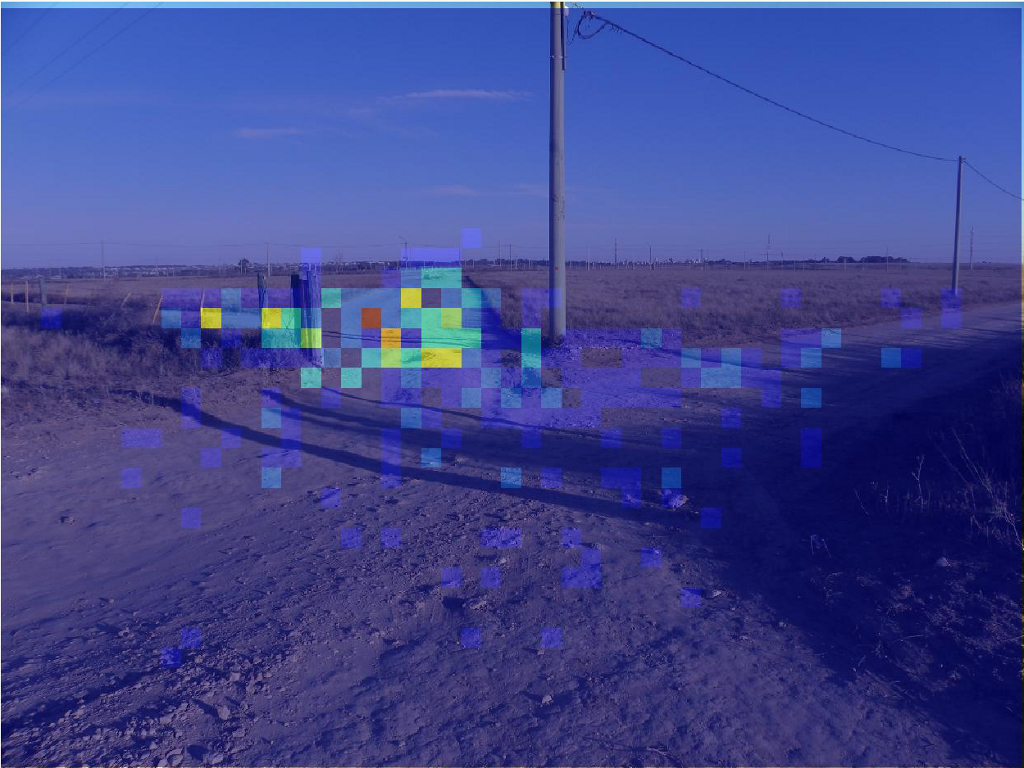
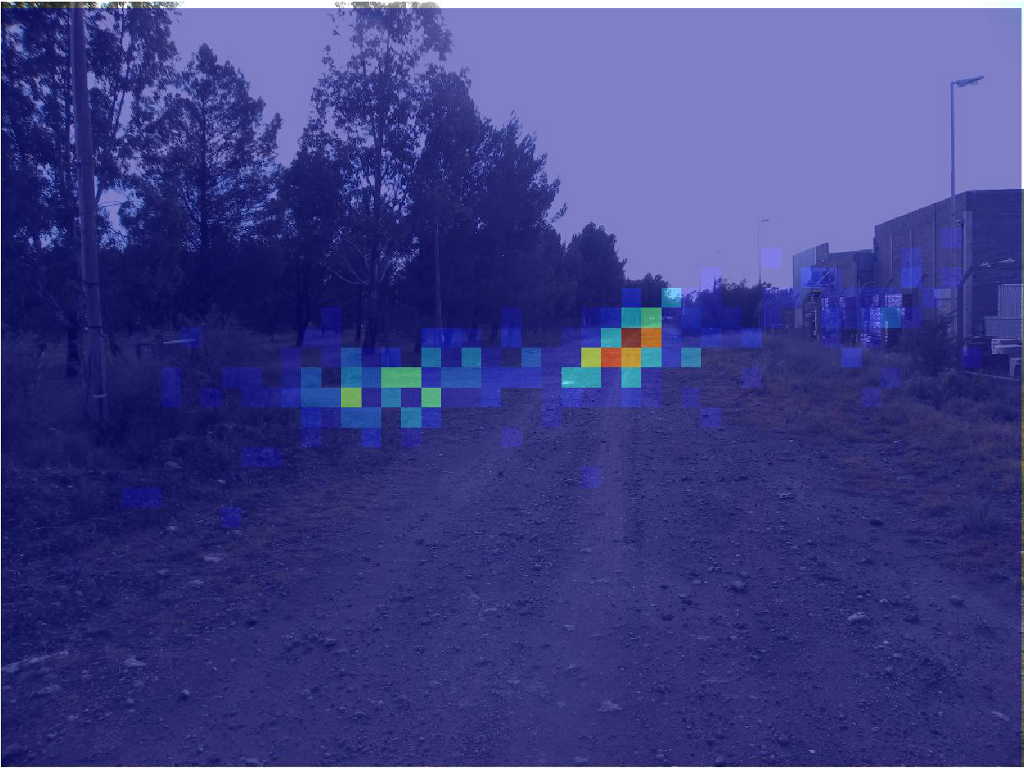
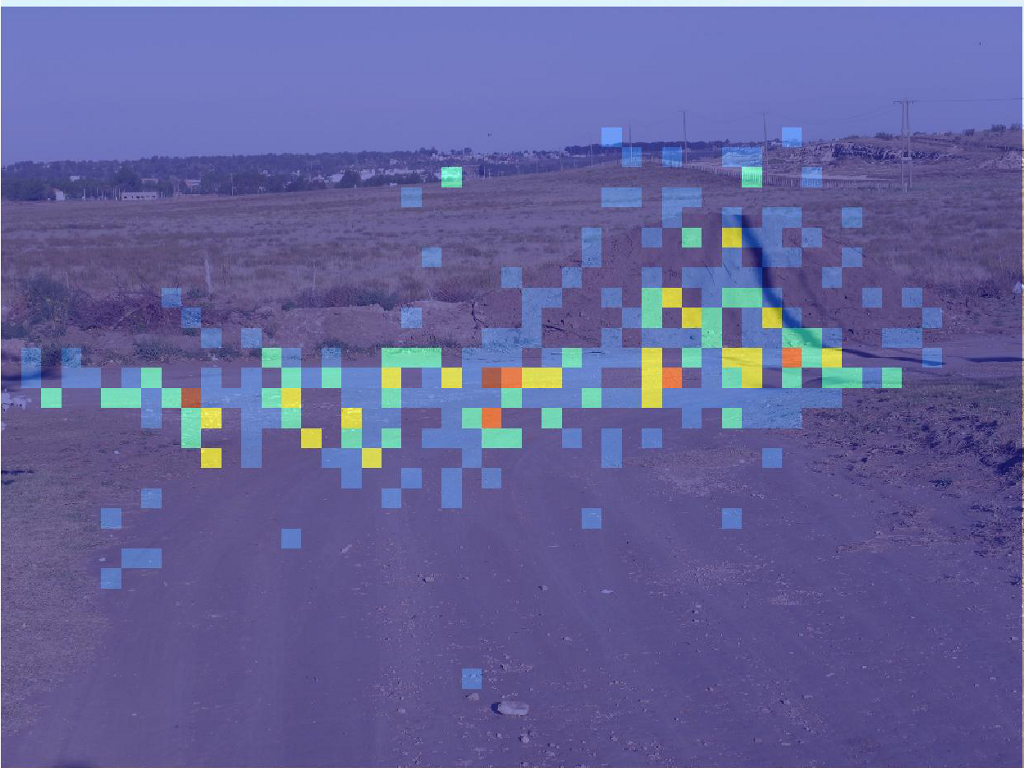
Fixations Position Histograms
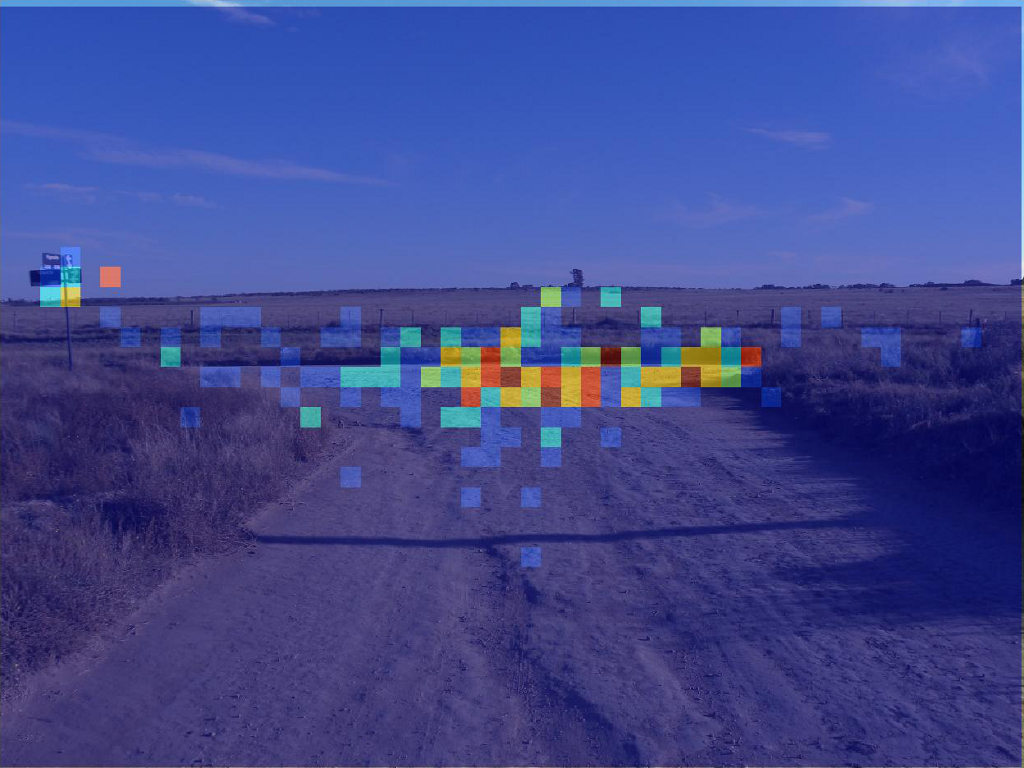
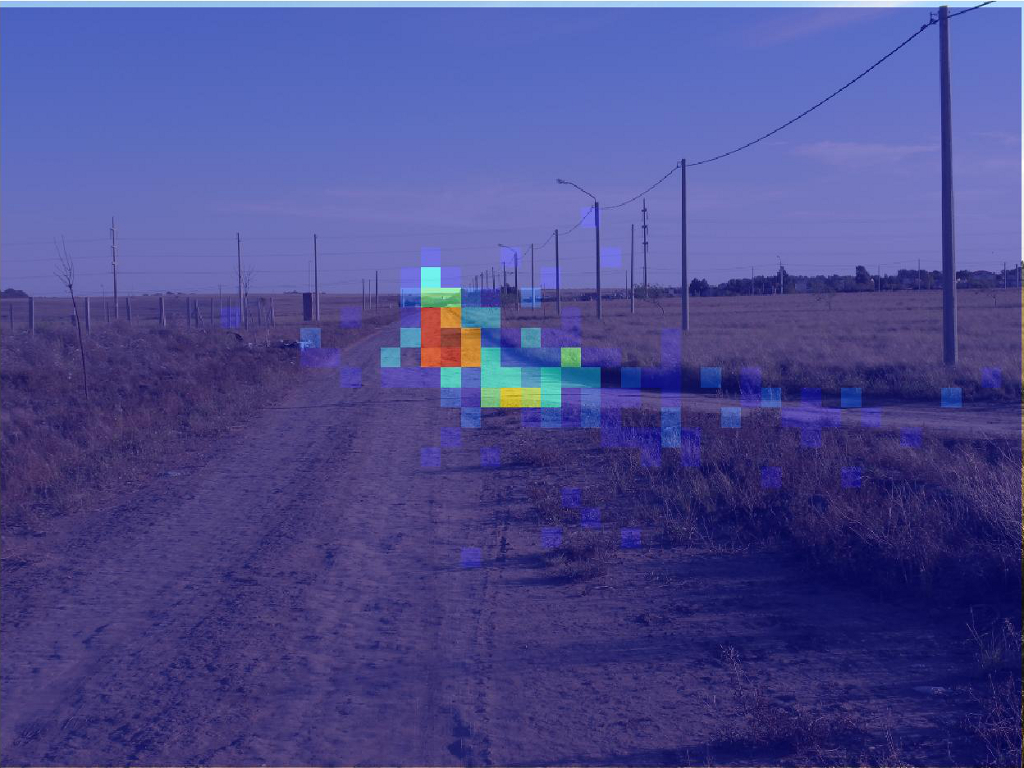
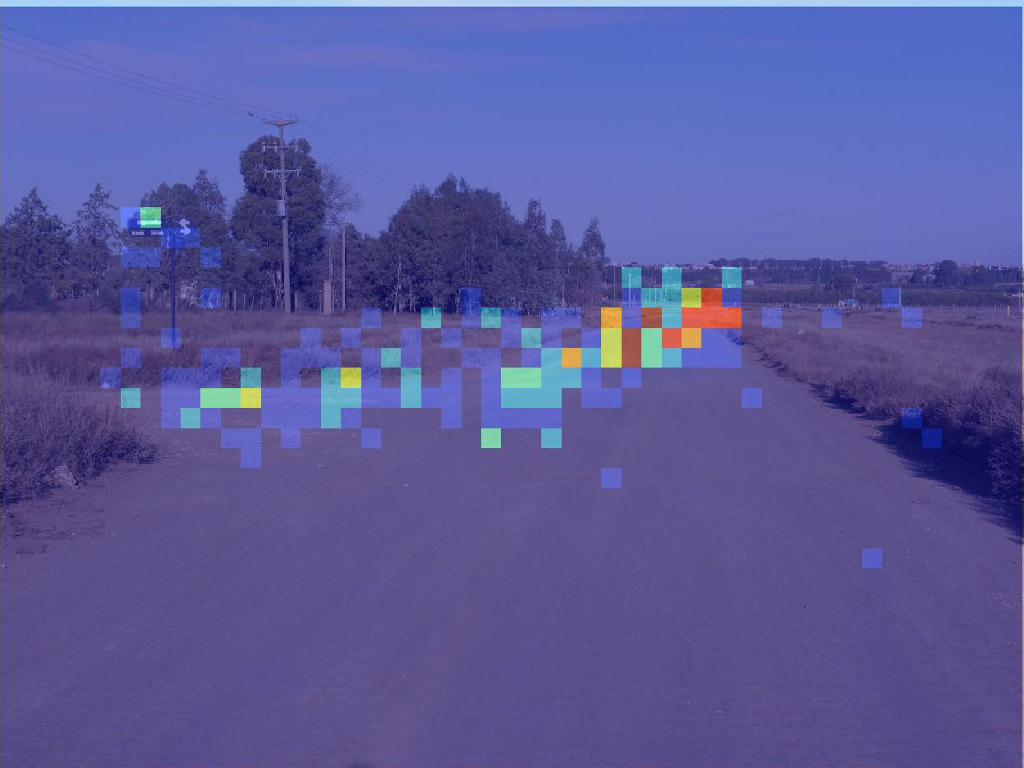
In order to appreciate the task-relevant image regions, an histogram of the right eye fixations position was made for each photograph and is shown here superimposed on the image. The size of the bins used for the histogram is 20x20 pixels. Dark red color indicates the highest count values while dark blue color indicates the lowest count value, commonly 0. The very first fixation recorded in each image is discarded (not used for histogram) because of the drift correction step made before each photograph which requires the volunteer to fix on the center of the image. You can click on each histogram to see it in full resolution.
Right Fixations Position Histograms for Training Images
Right Fixations Position Histograms for Test Images



















Contact Information
Any comments or suggestions relating to the dataset please do not hesitate to write to marcelo_moreyra@ieee.org